2019.01.17
【プレスリリース】ハダカデバネズミは尾を引っ張り、仲間の労働を妨害する 集団的意思決定に背く行動の発見
【研究概要】
人間社会では、他人の邪魔をすることを「足を引っ張る」と表現します(しかし、実際に足を掴んで引っ張ることは稀です)。それでは、ヒト以外の動物でも、他個体を邪魔する行動は見られるのでしょうか? 本研究では、真社会性という複雑な社会を形成する哺乳類ハダカデバネズミが、他個体の尻尾を咥えて後方に引きずり労働の妨害をすること、また、この行動には、妨害した個体が労働を独占している機能があることが分かりました。アリやハチに代表されるように、真社会性社会を形成する種は、コロニー全体の利益のために自己を犠牲にする利他行動を進化させています。このように高い社会的秩序を持つ種においても、仲間の「足を引っ張る」、妨害行動の存在と機能が世界で初めて明らかになりました。
【研究の背景】
多くの動物において、群れの構成個体が協調して、複数の選択肢の中からひとつの候補を選択することがあります。たとえば、アリはある個体が発見した餌場の情報を複数個体で共有し、協働して巣に餌を回収します。ミツバチが分蜂(巣の引越し)をする際、働き蜂(ワーカー)はまず多数の候補地を視察し、その中から、コロニー全体で一つの場所を選びます。このような意思決定は、集団的意思決定(collective decision making)と呼ばれ、アリやハチなど、真社会性 (eusocial) と呼ばれる社会を形成する動物において洗練化されています。
このような集団的意思決定は真社会性の哺乳類であるハダカデバネズミ(図1)でもみられます。東アフリカの乾燥地帯の地中のトンネルの中で生活するハダカデバネズミは、哺乳類でありながら真社会性社会を形成します。コロニーサイズは最大で200匹以上に達し、コロニー内の繁殖は、一匹の女王個体と少数の繁殖オス個体のみが行います。その他の個体は、ワーカーとなります。


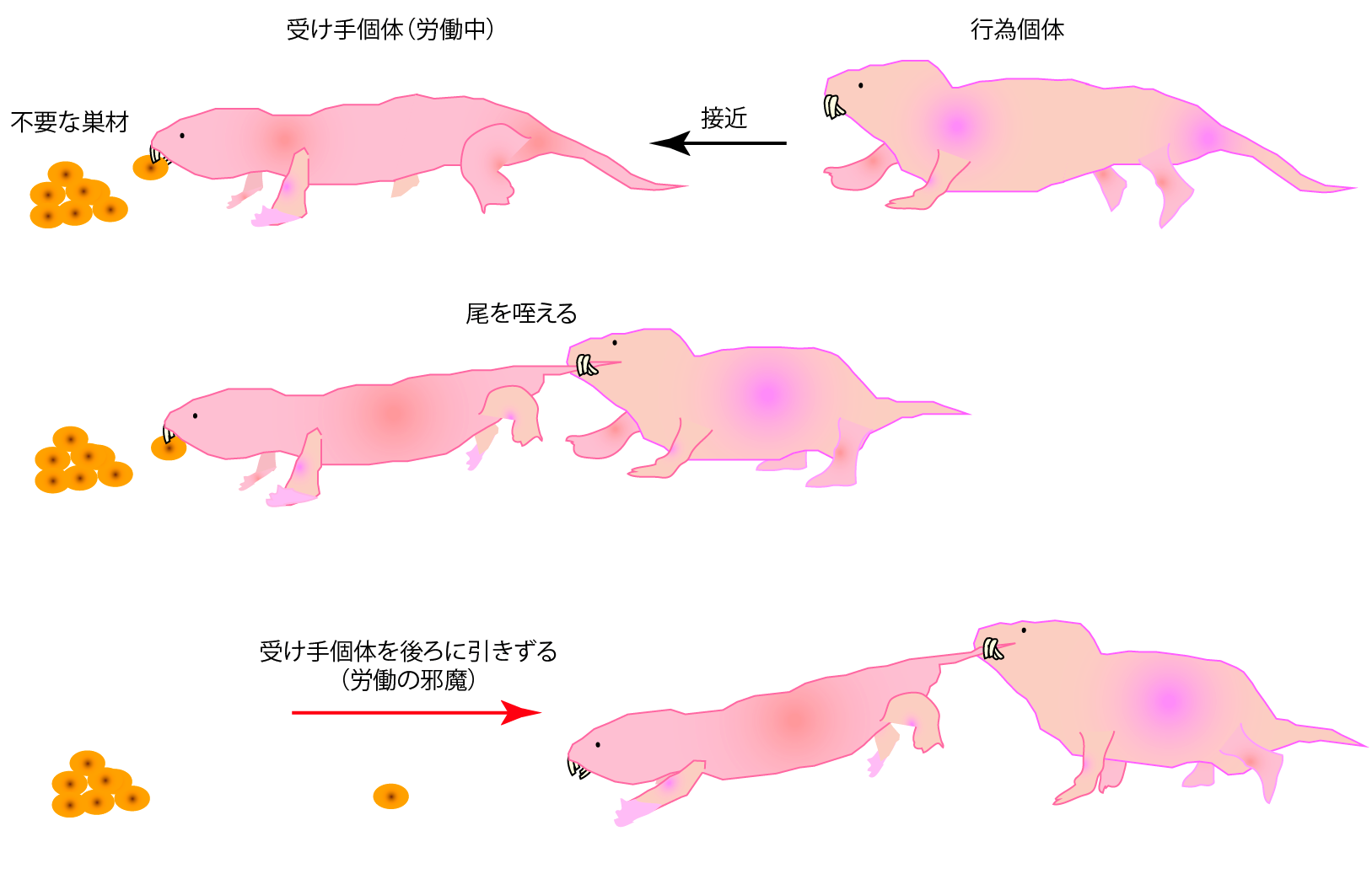
飼育状況におけるハダカデバネズミを対象にした私たちのこれまでの研究で、複数の個体が協力して、特定の部屋から不要な巣材を取り除く集団労働をすることを明らかにしました (Kutsukake et al. 2012) 。本研究では、この集団労働中の個体の行動を詳細に分析し、その結果、個体が他個体の労働を妨害していることを発見しました。その際には、妨害する個体(以下、行為個体)は対象個体(以下、受け手個体)の背後から近づき、その個体の尻尾をくわえて後方に引きずるtail tuggingという行動を行っていました(図2)。
集団的意思決定をする際、個体は仲間と一致団結して集団労働をすると考えられますが、本研究で発見された妨害行動は、集団労働を乱す非効率的な行動であると言えます。では、ハダカデバネズミは、どのような理由で仲間の労働を妨害するのでしょうか? 以下の分析により、妨害行動によって、行為個体が労働場所を独占している可能性が示唆されました。
【研究の内容】
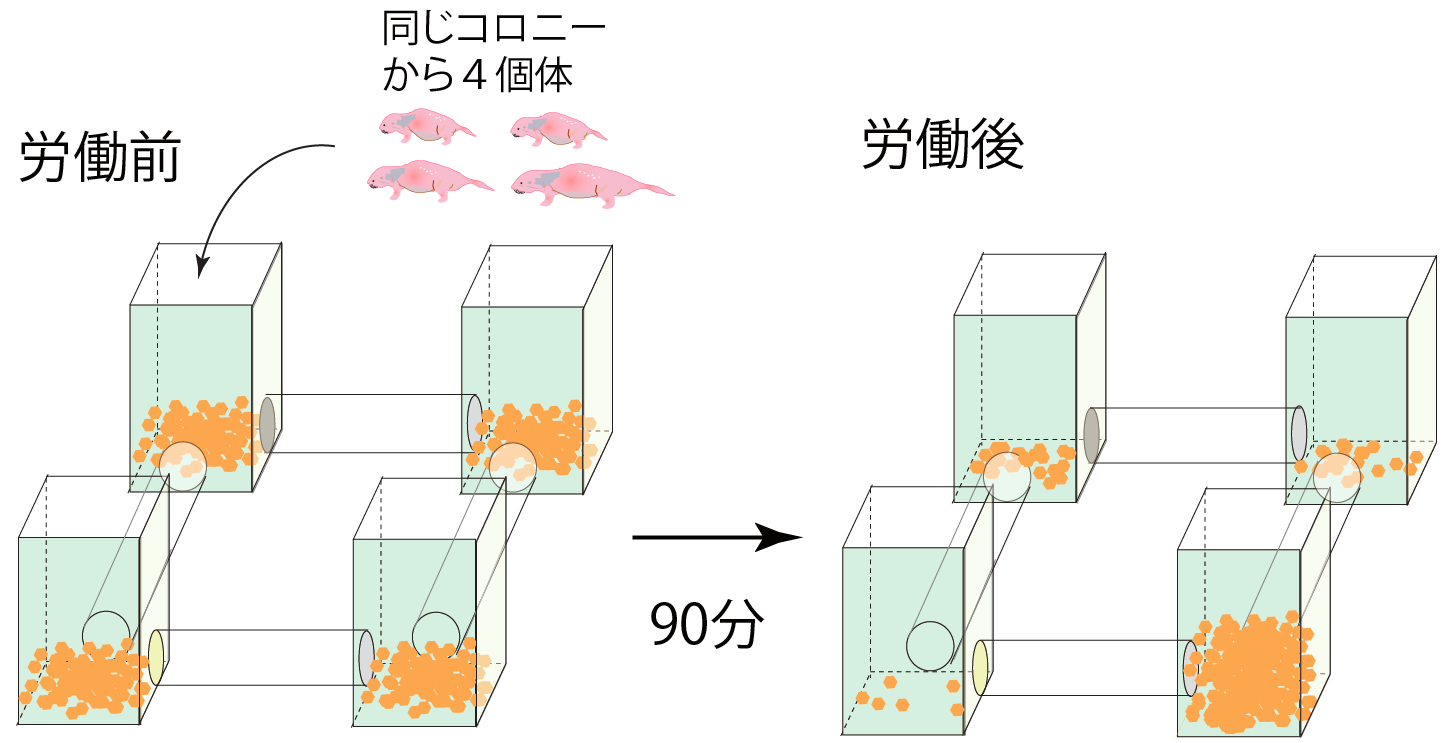
実験は、飼育ハダカデバネズミ(3つのコロニーからの31個体)を対象としています。4つの部屋を連結させた飼育スペースのなかに、同じコロニーから4個体を入れました(図3:詳細は、Kutsukake et al. 2012)。この4個体は、女王、繁殖オス、ワーカーという三つの社会的階級のなかから様々な組み合わせの構成になるように選別しました。各部屋には同量の巣材(プラスチック片300個)が入れられています。一回の実験は90分間で、全個体の行動はビデオ撮影され、個体の全行動を記録しました。このような実験を50回行いました。個体は、実験開始時から特定の部屋から巣材を運び出す労働を始め、他個体と協調して巣材の数を偏らせる(特定の部屋を空ける)ことが、過去の研究で判明しています (Kutsukake et al. 2012) 。
本研究では、この実験中の個体の行動を詳細に分析しました。その結果、合計75時間の観察時間中に138回の妨害行動が観察されました。この妨害行動の機能を探るために、誰が誰に、いつ、どこで、どのように妨害行動を行うかを分析しました。
誰が誰に行っていたか? ハダカデバネズミの社会では、女王、繁殖オス、ワーカーという社会的階級(カースト)が存在します。妨害行動の行為個体、受け手個体の組み合わせを調べたところ、全ての組み合わせで妨害行動が見られ、ワーカーが女王を妨害するケースも見られました。ハダカデバネズミの社会では、ワーカー個体間の順位関係は体重によって決定されます。行為個体と受け手個体の体重を比較したところ、体重が相対的に重い個体が軽い個体に行っていたのみならず、体重の軽い個体が重い個体に対しても妨害をしていました。
これらの結果から、妨害行動は個体の地位や順位によって決定されているわけではないことが示唆されました。
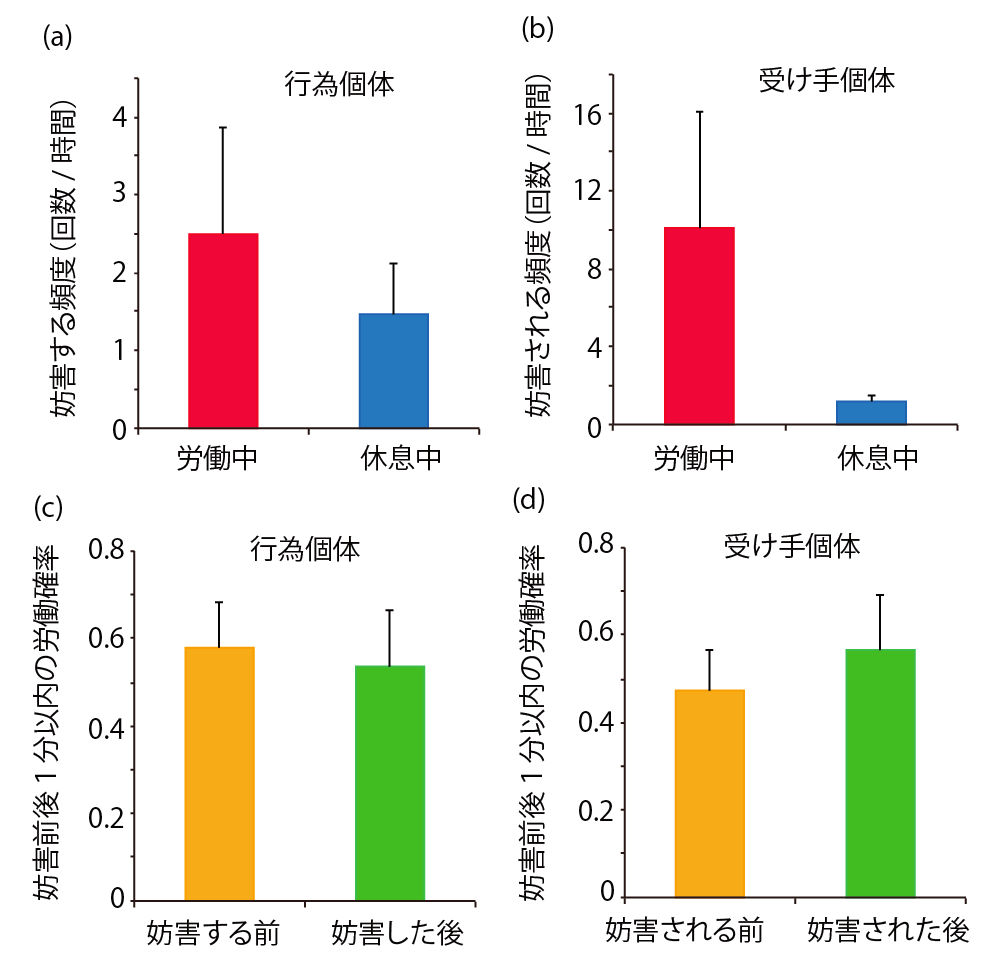
いつ、どこで、どのようなときに行っていたか? 妨害行動は、行為個体と受け手個体の双方が労働中に休息中よりも多く起きていました(図4a,b)。このことは、妨害行動が労働に関係していることを示しています。
また、妨害行動は、行為個体がよく働いていた部屋で多く起きていました。つまり、妨害行動によって、行為個体が自分の労働場所から他個体を排除していると言えます。その一方で、妨害個体が引きずって連れて行かれる部屋は、その部屋での行為個体の労働頻度とは関係していませんでした。このことから、行為個体は、受け手個体を特定の部屋に連れて行くことが目的ではないと推測されます。
妨害後の行動 妨害した個体は、妨害する以前と同様の頻度で労働を行いました(図4c)。また、受け手個体も、妨害された後、妨害される前と同様の確率で労働を行いました(図4d)。これらの結果から、妨害行動は、労働頻度自体には影響を与えないことが分かりました。
【結論・今後の展望】
これらの結果をまとめると、行為個体は、自分が働いている部屋での労働を独占するために、そこで働く他個体を取り除いていたと言えます。一般に、真社会性動物における集団的意思決定は、全個体が一致団結して労働すると考えられてきました。その知見に反し、ハダカデバネズミのコロニーでは、各個体の微細な行動をみると個体間に労働をめぐる妨害が存在することが本研究によって分かりました。
一つの目的を達成するためにコロニーが労働しているのであれば、他個体を妨害するよりも、協力して労働するほうが効率的なはずです。ハダカデバネズミの社会において、他個体を妨害する行動はコロニーのためになる行動とは考えられず、進化生物学的に説明することが難しい現象です。では、なぜ、ハダカデバネズミは、このように無駄な行動を行うのでしょうか? この疑問に対する答えは本研究から明らかにはできませんでしたが、ひとつの可能性として、妨害行動は、本種が持つ極端に利他的な行動傾向の副産物である可能性があります。ハダカデバネズミでは、個体がコロニーのために働く極端な利他性を進化させています。この極端な利他性は、ハダカデバネズミの生活の多くの状況において、コロニーの利益を上昇させるために役立っています。このような行動傾向の副産物として、他個体を妨害するほどの労働を行ってしまうのかもしれません。この点を明らかにするためにはさらなる研究が必要です。
【論文情報】
Kutsukake, N., Inada, M., Sakamoto, S. H., Okanoya, K. Behavioural interference in work among eusocial naked mole-rats. Journal of Ethology (真社会性ハダカデバネズミにおける労働行動の妨害)DOI: 10.1007/s10164-018-0581-9
【ビデオ】
https://www.dropbox.com/s/3gylh738tevwi2o/ESM_tailtugging.mov?dl=0
にて公開(ビデオ提供:熊本大学、三浦恭子・准教授)
【著者】
沓掛展之(総合研究大学院大学・先導科学研究科・講師;研究遂行時、理化学研究所・脳科学総合研究センター・基礎科学特別研究員)稲田正幸(研究遂行時、理化学研究所・脳科学総合研究センター・研究補助員)
坂本信介(宮崎大学・農学部・講師)
岡ノ谷一夫(東京大学・総合文化研究科・教授、理化学研究所・脳神経科学研究センター・認知行動連携研究チーム・チームリーダー;研究遂行時、理化学研究所・脳神経科学総合研究センター・認知行動連携研究チーム)
【参考文献】
Kutsukake N, Inada M, Sakamoto SH & Okanoya K. 2012 A distinct role of the queen in coordinated workload and soil distribution in eusocial naked mole-rats. PLOS ONE 7 : e44584